|
DOI: 10.7256/2454-0714.2021.3.35972
Received:
20-06-2021
Published:
16-07-2021
Abstract:
This article discusses how to the goal pursuers can simultaneously achieve their goals in the group pursuit task. The proposed pursuit model suggests the pursuer to follow the set motion pattern, which is structured at each point of time. Such trajectory is a compound curve that takes into account the curvature constraints. The time of achieving the goal of each pursuer depends on the velocity and minimum radius of curvature of the trajectory. Multi-factor analysis of velocity modules and minimum radius of curvature of the trajectories of each pursuer for simultaneous achievement of their goals is the focus of this research
Keywords:
Persuit, Pursuer, Target, Curvature, Line, Trajectory, Multifactorial, Attainment, Parallel, Plane
This article written in Russian. You can find original text of the article here
.
I. Введение
В настоящее время развивается технология беспилотных барражирующих летательных снарядов с автономным управлением, оснащенных системами с искусственным интеллектом. Актуальной задачей является, когда группа преследователей по сигналу оператора сходит со своих заданных траекторий, начинает преследование группы целей. Достижение целей может происходить одновременно или в назначенные значения времени. Распределение целей может происходить автоматически или назначаться оператором. В данной статье рассматривается сценарий, когда цели движутся прямолинейно и равномерно на плоскости, а распределение целей по преследователям считается произведенным.
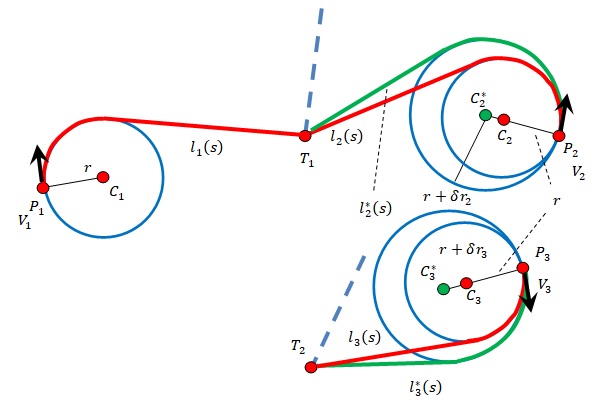
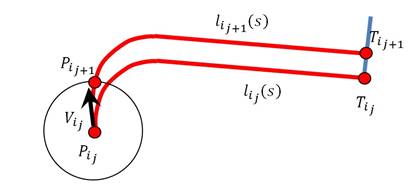
Рассмотрим модель расчета траектории преследователя на плоскости, где в каждый момент времени от преследователя до цели строится прогнозируемая траектория, которой преследователь будет стараться придерживаться (Рис. 1).
|
|
|
Рис. 1. Групповое преследование множества целей
|
Кривые  , ,  , ,  (Рис. 1) состоят из сегмента дуги окружности и прямолинейного отрезка. Радиус окружностей и есть ограничение по кривизне прогнозируемых траекторий движения преследователей в нашей модели. Если преследователь находился в момент начала преследования в точке (Рис. 1) состоят из сегмента дуги окружности и прямолинейного отрезка. Радиус окружностей и есть ограничение по кривизне прогнозируемых траекторий движения преследователей в нашей модели. Если преследователь находился в момент начала преследования в точке  с вектором скорости с вектором скорости  , то центр окружности , то центр окружности  радиуса радиуса  будет находиться в точке: будет находиться в точке:
Затем из точки положения цели  строится касательная к окружности строится касательная к окружности  . Совокупность касательной и окружности будет базовой линией прогнозируемой траектории движения преследователя . Совокупность касательной и окружности будет базовой линией прогнозируемой траектории движения преследователя  . Отметим, что в уравнении базовой линии из однопараметрического множества прогнозируемых траекторий параметризация производится от ее длины дуги. . Отметим, что в уравнении базовой линии из однопараметрического множества прогнозируемых траекторий параметризация производится от ее длины дуги.
При новом положении цели  линия линия  смещается, оставаясь параллельной самой себе (Рис.2). смещается, оставаясь параллельной самой себе (Рис.2).
|
|
|
Рис. 2. Однопараметрические сети прогнозируемых траекторий движения преследователей
|
Если  преследователь в момент времени преследователь в момент времени  находится в точке находится в точке  (Рис. 3), имея при этом прогнозируемую траекторию движения (Рис. 3), имея при этом прогнозируемую траекторию движения  , соединяющую с текущим положением цели , соединяющую с текущим положением цели  , то следующая точка траектории преследователя будет точка , то следующая точка траектории преследователя будет точка  . .  . .
|
|
|
Рис. 3. Итерационный процесс расчета траектории преследователя
|
Точка есть точка пересечения линии  , соответствующей положению цели , соответствующей положению цели  в следующий момент времени в следующий момент времени  , и окружности с центром в точке и радиуса , и окружности с центром в точке и радиуса  , ,  . Такова модель построения траекторий преследователя. . Такова модель построения траекторий преследователя.
II. Постановка задачи
Рассмотрим задачу группового преследования, когда группа преследователей догоняет группу целей. Будем считать, что каждый преследователь стремится достичь своей цели , хотя у некоторых преследователей цели могут совпадать, как показано на рисунках 1 и 2.
Причем преследователь достигает цели за определенное время  , двигаясь с определенной скоростью . Для одновременного достижения целей необходимо равенство всех значений определенному значению. , двигаясь с определенной скоростью . Для одновременного достижения целей необходимо равенство всех значений определенному значению.
На рисунке 1 показано, что для изменения длины базовой линии можно изменять радиус касательной окружности. Касательная окружность была введена для того, чтобы преследователь мог плавно перейти на прямолинейную траекторию. Если бы это было так, то задача была бы сведена к преследованию методом параллельного сближения.
Поскольку начальная скорость преследователя направлена произвольно, то при помощи составной базовой линии, которая при движении цели перемещается, оставаясь параллельной сама себе, происходит плавный переход к методу параллельного сближения с соблюдением ограничений по кривизне (Рис.2).
Рисунок 2 дополнен ссылкой на анимированное изображение, где можно посмотреть плавный переход к параллельному сближению.
Целью данной статьи является описание метода, при котором преследователь достигает цели в назначенное время из допустимых значений. Как следствие, можно рассматривать одновременное достижение своих целей группой преследователей.
III. Теория
По результатам исследований, разработана тестовая программа одновременного достижения целей преследователями, которую можно посмотреть на ресурсе [6]. В этой программе реализован алгоритм, который реализует итерационную схему расчета траектории преследователя, показанную на рисунке 3.
|
|
|
Рис. 4. Определение радиуса окружности на эпюре Радищева
|
В модели считается, что существует зависимость для преследователя  , который достигает своей цели , который достигает своей цели  , за время , за время  : :  , где , где  – координаты точек положения преследователя и цели в момент начала процесса преследования, – координаты точек положения преследователя и цели в момент начала процесса преследования,  – единичные векторы направления движения преследователя и цели в момент начала процесса преследования, – единичные векторы направления движения преследователя и цели в момент начала процесса преследования,  - модули скоростей преследователя и цели в процессе преследования, - модули скоростей преследователя и цели в процессе преследования,  - радиус окружности, смысл которой показан на рисунках 1 и 3. Фактически, в модели подсчитывается число шагов, за которые преследователь достигает цель. Число шагов, при известном дискретном промежутке времени, можно сопоставить со временем реальным. - радиус окружности, смысл которой показан на рисунках 1 и 3. Фактически, в модели подсчитывается число шагов, за которые преследователь достигает цель. Число шагов, при известном дискретном промежутке времени, можно сопоставить со временем реальным.
Если цель движется прямолинейно и равномерно, то нашу зависимость времени достижения цели в уже начавшемся итерационном процессе можно считать функцией от двух переменных:  , от модуля скорости преследователя и от радиуса кривизны окружности. , от модуля скорости преследователя и от радиуса кривизны окружности.
Хотя, в модели считается, что преследователь движется с постоянной скоростью  , но ничто не мешает нам изменять значения модуля скорости, как и радиуса кривизны. Допустим, что модуль скорости принимает дискретные значения из ряда , но ничто не мешает нам изменять значения модуля скорости, как и радиуса кривизны. Допустим, что модуль скорости принимает дискретные значения из ряда  , а радиус окружности из рисунков 1, 3 принимает значения , а радиус окружности из рисунков 1, 3 принимает значения  . .
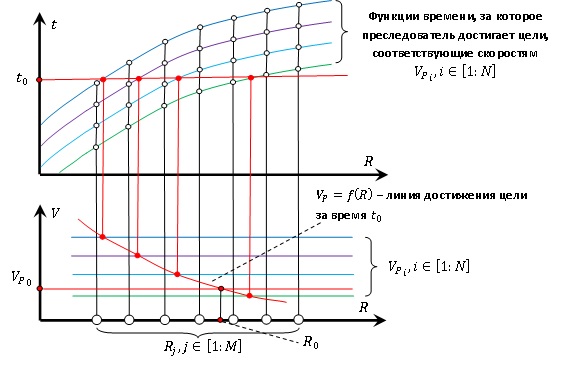
Для дальнейших исследований применяется эпюр Радищева [1], где используются координатные плоскости  и и  (Рис. 4). (Рис. 4).
На рисунке 4 показано экспериментальное построение временных зависимостей  . На плоскости схематически показаны графики зависимостей времен достижения цели преследователем от радиуса окружности при фиксированном значении скорости . . На плоскости схематически показаны графики зависимостей времен достижения цели преследователем от радиуса окружности при фиксированном значении скорости .
В качестве одного из оптимизирующих факторов [1] на плоскости выбирается равенство  , где , где  - требуемое время достижения цели. Далее, на плоскости, для решения нашей задачи, на плоскости в качестве второго оптимизирующего фактора выбирается равенство - требуемое время достижения цели. Далее, на плоскости, для решения нашей задачи, на плоскости в качестве второго оптимизирующего фактора выбирается равенство  , где , где  - это постоянная скорость преследователя. - это постоянная скорость преследователя.
Хотя, в постановке задачи говорится о том, что модуль скорости преследователя является неизменным, построенный ряд значений скоростей необходим для расчета радиуса окружности  на плоскости проекций . на плоскости проекций .
По линиям связи на плоскости проекций находятся соответствующие точки пересечения с линиями уровня скоростей  (Рис. 4). По полученным точкам в тестовой программе выполняется полиномиальная регрессия и, в итоге, получаем функцию зависимости скорости преследователя от радиуса окружности, при которой происходит достижение цели за время . (Рис. 4). По полученным точкам в тестовой программе выполняется полиномиальная регрессия и, в итоге, получаем функцию зависимости скорости преследователя от радиуса окружности, при которой происходит достижение цели за время .
Затем ищется точка пересечения функции  (Рис. 4) c линией уровня . Абсцисса точки пересечения и есть искомый радиус окружности, чтобы достичь цели преследователем P за время со скоростью . (Рис. 4) c линией уровня . Абсцисса точки пересечения и есть искомый радиус окружности, чтобы достичь цели преследователем P за время со скоростью .
Расчет ведется при условии того, что цель движется равномерно и прямолинейно. Если цель изменяет направление или скорость, то для достижения ее рассчитывается новый радиус окружности составной базовой линии (аналог линии визирования метода параллельного сближения), ставится новое время достижения при прежней скорости преследователя.
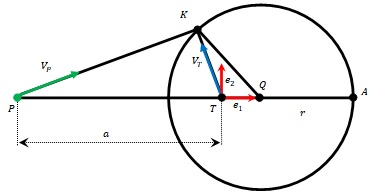
Низший предел времени достижения цели при ее равномерном и прямолинейном движении будет, когда скорость преследователя направлена в точку  на окружности Аполлония [2,3,4,5] (Рис. 5). на окружности Аполлония [2,3,4,5] (Рис. 5).
|
|
|
Рис. 5. Окружность Аполлония
|
Окружностью Аполлония называется геометрическое место точек, отношение расстояний от которых до двух заданных точек — величина постоянная, не равная единице. На рисунке 5 это можно проиллюстрировать как:  . .
При рассмотрении множественного преследования группы целей, то в тестовой программе производится предварительный расчет траекторий движения преследователей при заданных начальных параметрах. Из времен достижения целей для расчета одновременного достижения выбирается наибольшее время. И это время выбирается критерием для расчета траекторий остальных преследователей. Этот момент проиллюстрирован на рисунке 2, рисунок 2 дополнен ссылкой на анимированное изображение, где можно будет посмотреть на одновременное достижение цели двумя преследователями.
|
|
|
Рис. 6 Достижение целей в различное назначенное время
|
На рисунке 6 показано, как для одного из преследователей было установлено более короткое время достижения цели. Рисунок 6 также дополнен ссылкой на анимированное изображение, где можно посмотреть достижение целей в различное назначенное время.
IV. Результаты экспериментов
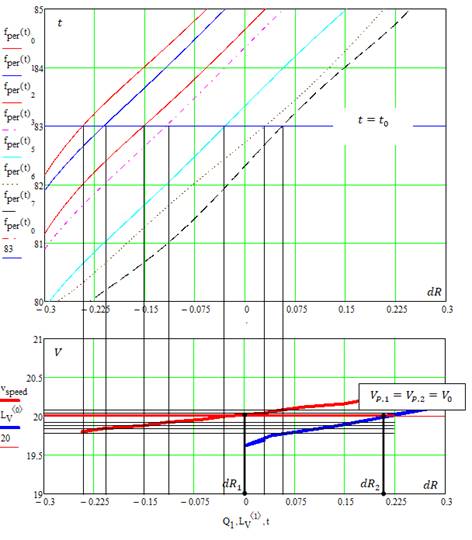
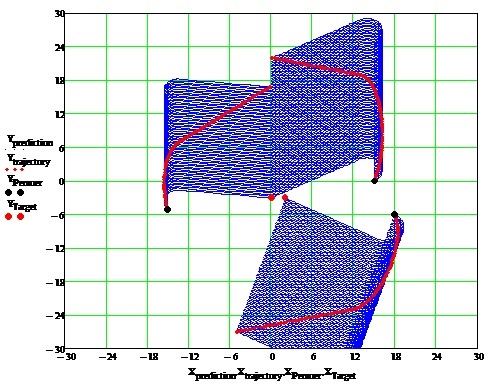
На рисунке 7 приведены некоторые результаты работы многофакторного анализа в задаче одновременного достижения цели двумя преследователями. Цель движется прямолинейно и равномерно. Для каждого преследователя построили ряд допустимых скоростей. Ряд допустимых значений радиуса окружности варьируется при помощи дискретных переменной  . На графиках рисунка 7 это шкала . . На графиках рисунка 7 это шкала .
На плоскости проекций  строим однопараметрическую сеть линий. Каждая линия соответствует определенному значению скорости и выражает зависимость времени достижения цели от приращения радиуса окружности. На графике рисунка 7 показана однопараметрическая сеть линий скоростей одного из преследователей. Для второго в тестовой программе многофакторного анализа построена аналогичная сеть. строим однопараметрическую сеть линий. Каждая линия соответствует определенному значению скорости и выражает зависимость времени достижения цели от приращения радиуса окружности. На графике рисунка 7 показана однопараметрическая сеть линий скоростей одного из преследователей. Для второго в тестовой программе многофакторного анализа построена аналогичная сеть.
Для каждого преследователя выбирается первый оптимизирующий фактор [1], отвечающий за одновременное достижение, . Где - наибольшее из времен достижения цели, если бы преследователи независимо догоняли цель при таких же начальных условиях. На плоскости ищутся точки пересечения с линий уровня с линиями скоростей однопараметрической сети. Точки пересечения находятся при помощи встроенных процедур решения уравнений. В системе компьютерной математики MathCAD это может быть процедура root. Найденным точкам пересечения отвечают значения и  на плоскости проекций на плоскости проекций  . .
К полученным точкам на плоскости проекций применяется встроенная процедура полиномиальной регрессии и находится характеристическая кривая зависимости скорости от радиуса окружности составной базовой линии, которые приведены на рисунке 1.
На рисунке 7, на плоскости проекций изображена такая же характеристическая линия зависимости скорости и для другого преследователя. Далее, применятся второй оптимизирующий фактор  . В тестовой программе объекты движутся с одинаковыми скоростями. Встроенными средствами компьютерной математики ищутся точки пересечения с линией уровня . В тестовой программе объекты движутся с одинаковыми скоростями. Встроенными средствами компьютерной математики ищутся точки пересечения с линией уровня  . Этим точкам соответствуют значения . Этим точкам соответствуют значения  и и  . .
| |
|
Рис. 7. Результаты многофакторного анализа
|
При запуске итерационного процесса с заданным значением времени достижения цели , с заданными модулями скоростей движения  , с найденными значениями приращений и к начальному радиусу окружности достигнуто одновременное достижение цели двумя преследователями. Этот факт продемонстрирован дополнением к рисунку 2. , с найденными значениями приращений и к начальному радиусу окружности достигнуто одновременное достижение цели двумя преследователями. Этот факт продемонстрирован дополнением к рисунку 2.
V. Обсуждение результатов
В данной статье предложен метод достижения группой преследователей множества целей, в котором может назначаться время достижения. Одновременное достижение целей есть частный результат данного метода. Данный метод является развитием метода параллельного сближения. Если данный метод реализовать в пространстве, то следует добиться того, чтобы векторы преследователя и цели находились в одной плоскости.
Если задача преследования происходит в трехмерном пространстве, и мы хотим свести ее к методу параллельного сближения, но скорость преследователя направлена произвольно, то базовую линию прогнозируемых траекторий движения преследователя следует строить в плоскости, образованной линией визирования и скоростью преследователя.
Следующий шаг преследователя будет точка пресечения сферы с радиусом равным шагу преследователя и базовой линии, параллельно перенесенной так, чтобы один ее конец совмещался с точкой положения цели.
Теперь к вопросу нахождения окружности Аполлония и точки в трехмерном пространстве. Сама окружность будет находиться в плоскости, образованной линией визирования и скоростью цели. Параметры окружности Аполлония такие как центр окружности (т.  ), радиус окружности ), радиус окружности  , точка Аполлония (т. , точка Аполлония (т.  ), точка определяются вектором скорости цели, модулем скорости преследователя, положениями преследователя и цели. Имеется аналитическое решение этой в плоской системе координат, показанной на рисунке 5. Центр координат находится в точке положения цели, вектор абсцисс будет единичным вектором вдоль линии визирования, соединяющей положения преследователя и цели, а вектор ординат будет перпендикулярным вектору абсцисс, но в плоскости, образованной линией визирования и вектором скорости цели. ), точка определяются вектором скорости цели, модулем скорости преследователя, положениями преследователя и цели. Имеется аналитическое решение этой в плоской системе координат, показанной на рисунке 5. Центр координат находится в точке положения цели, вектор абсцисс будет единичным вектором вдоль линии визирования, соединяющей положения преследователя и цели, а вектор ординат будет перпендикулярным вектору абсцисс, но в плоскости, образованной линией визирования и вектором скорости цели.
VI. Выводы и заключение
Методы многомерной начертательной геометрии, применяемые в статье, заключались в вариации модулей скоростей и радиусов прилегающих к траекториям преследователей окружностям. Хотя по условиям задачи модули скоростей преследователей являются неизменными. Использование в качестве одного из оптимизрующих факторов фиксированного значения модуля скорости преследователя является основным в данной статье.
Если анализировать модули скоростей, радиусы прилегающих к преследователям окружностей и начальные направления движения преследователей, то следует прибегнуть к модели четырехмерного пространства, изложенного в работах Болотова (гиперэпюр Болотова)
Результаты исследований, приведенные в данной статье, могут быть востребованы разработчиками барражирующих беспилотных летательных аппаратов, которые выполняют групповые согласованные задачи. Роль оператора наведения может быть сведена к указанию целей и контролю над выполнением задач.
References
1. V. Ya. Volkov, M.A. Chizhik. Graficheskie optimizatsionnye modeli mnogofaktornykh protsessov. / Monografiya, g. Omsk, : Izdatel'sko-poligraficheskii tsentr OGIS, 644099, Omsk, ul. Krasnogvardeiskaya, 9, 101 s., 2009 g
2. Aizeks R. Differentsial'nye igry. Moskva: Mir, 1967 g..
3. L. S. Pontryagin. Lineinaya differentsial'naya igra ukloneniya/ Tr. MIAN SSSR. 1971. T. 112. S. 30-63.
4. N. N. Krasovskii, A. I. Subbotin. Pozitsionnye differentsial'nye igry/ M, Nauka, 1974 g.
5. Petrosyan L. A. Differentsial'nye igry presledovaniya/ Izd-vo LGU, 222 c., 1977 g.
6. http://dubanov.exponenta.ru Razdel «Odnovremennoe dostizhenie tseli na ploskosti» (data obrashcheniya 22.05.2021)
7. Video, rezul'taty programmy modelirovaniya odnovremennogo dostizheniya tseli, https://www.youtube.com/watch?v=7VNHNwCbWrg (data obrashcheniya 22.05.2021)
8. Video, rezul'taty modelirovaniya odnovremennogo dostizheniya dvukh tselei tremya presledovatelyami s vizualizatsiei seti linii prognoziruemykh traektorii, https://www.youtube.com/watch?v=NNJDJOJT34I (data obrashcheniya 22.05.2021)
9. Video, rezul'taty modelirovaniya odnovremennogo dostizheniya dvukh tselei tremya presledovatelyami bez vizualizatsii seti linii prognoziruemykh traektorii, https://www.youtube.com/watch?v=tdbgoNoby3A (data obrashcheniya 22.05.2021)
10. Video, rezul'taty modelirovaniya odnovremennogo dostizheniya dvukh tselei tremya presledovatelyami v naznachennye znacheniya vremeni, https://www.youtube.com/watch?app=desktop&v=F6MTsWZL2BY&feature=youtu.be (data obrashcheniya 22.05.2021)
11. Vagin D. A., Petrov N. N. Zadacha po presledovaniyu skoordinirovannykh begletsov // Izvestiya RAN. Teoriya i sistemy upravleniya. 2001. № 5. Str. 75-79.
12. Bannikov A. S. Nekotorye nestatsionarnye zadachi gruppovogo presledovaniya // Trudy Instituta matematiki i informatiki UdGU. 2013. Vypusk 1 (41), s. 3-46
13. Bannikov A. S. Nestatsionarnaya zadacha gruppovogo presledovaniya // Trudy Matematicheskogo tsentra Lobachevskogo. Kazan': Izd-vo Kazanskogo matematicheskogo obshchestva, 2006, Vyp. 34, str. 26-28.
14. Izmest'ev I.V., Ukhobotov V.I. «Zadacha presledovaniya malomanevrennykh ob''ektov s terminal'nym mnozhestvom v vide kol'tsa», Materialy mezhdunarodnoi konferentsii «Geometricheskie metody v teorii upravleniya i matematicheskoi fizike: differentsial'nye uravneniya, integriruemost', kachestvennye teoriya »Ryazan', 15-18 sentyabrya 2016 g., Itogi nauki i tekhniki. Temat. obz., 148, VINITI RAN, Moskva, 2018, 25-31
15. Video, rezul'taty modelirovaniya odnovremennogo dostizheniya dvukh tselei tremya presledovatelyami s vizualizatsiei seti linii prognoziruemykh traektorii, https://www.youtube.com/watch?v=NNJDJOJT34I
16. Video, rezul'taty modelirovaniya odnovremennogo dostizheniya dvukh tselei tremya presledovatelyami bez vizualizatsii seti linii prognoziruemykh traektorii, https://www.youtube.com/watch?v=tdbgoNoby3A
17. Svidetel'stvo o gosudarstvennoi registratsii programmy dlya EVM № 2020665641. Kinematicheskaya model' metoda parallel'nogo sblizheniya
18. Bolotov, V.P. Nachertatel'naya geometriya mnogomernogo prostranstva [Elektronnyi resurs] : monografiya / V.P. Bolotov // Valerii Bolotov : avt. stranitsa. – Rezhim dostupa : http://vm.msun.ru/Autor/Dis_dokt/Ngeo_mng.htm. – Zagl. s ekrana.
|

 Eng
Eng