|
Software systems and computational methods
Reference:
Shekhovtsov, G.A., Zhilina, N.D., Raskatkina, O.V. (2019). Non-contact method for determining the linearity of crane rails of bridge cranes by processing photo images. Software systems and computational methods, 4, 105–114. https://doi.org/10.7256/2454-0714.2019.4.31110
Non-contact method for determining the linearity of crane rails of bridge cranes by processing photo images
Shekhovtsov Gennady Anatolyevich
Doctor of Technical Science
Professor, Department of Geoinformatics, Geodesy and Cadastre Department, Nizhny Novgorod State University of Architecture and Civil Engineering
603950, Russia, g. Nizhnii Novgorod, ul. Il'inskaya, 65, korpus 5

|
kaf_ig@nngasu.ru
|
|
 |
Zhilina Natalya Dmitrievna
PhD in Pedagogy
Associate Professor, Department of Engineering Geometry, Computer Graphics and Computer-aided Design Department, Nizhny Novgorod State University of Architecture and Civil Engineering
603950, Russia, g. Nizhnii Novgorod, ul. Il'inskaya, 65, korpus 3
|
|
zhilina@nngasu.ru
|
|
|
|
Raskatkina Ol'ga Valer'evna
Postgraduate Student, Department of Engineering Geometry, Computer Graphics and Computer-Aided Design, Nizhny Novgorod State University of Architecture and Civil Engineering
603950, Russia, Nizhegorodskaya oblast', g. Nizhnii Novgorod, ul. Il'inskaya, 65
|
|
Raskatkina.o@mail.ru
|
|
|
|
DOI: 10.7256/2454-0714.2019.4.31110
Received:
21-10-2019
Published:
06-01-2020
Abstract:
The article describes a method for determining the linearity of crane rails of bridge cranes by processing photo images. The method does not require marking of the shooting points on the rails, the use of special devices and performing a large number of angular, linear or other measurements. The method uses a horizontal reference line drawn on the image or created using the image on the image of the thread hanging freely in front of the lens cord plummet. The line can also be created using the Plumb-bob program, which gives the image of a vertical line. The image processing algorithm is described using a raster image editor to determine the deviations of the axial points of the rail from the reference line. Various options are being considered for determining the size of one pixel depending on the shooting distance and the height of the camera above the rail. The results of measurements and their comparison with the results obtained by traditional methods, which showed a difference of 0-5 mm are presented. An algorithm for determining the number of pixels contained in a line corresponding to a given distance to any shooting point is described, which allows for the determination of deviations in the image anywhere in the crane path.
Keywords:
photo images, pixel, basis, plumb, reference line, straightdness, non-contact measurements, camera, crane rail, deviation
This article written in Russian. You can find original text of the article here
.
Abstract.
The article describes a method for determining the linearity of crane rails of bridge cranes by processing photo images. The method does not require marking of shooting points on rails, using special devices and performing a large number of angular, linear or other measurements. The method uses a horizontal reference line drawn on the image or created using the image on the image of the thread hanging freely in front of the lens cord plummet. The line can also be created using the Plumb-bob program, which gives the image of a vertical line. The image processing algorithm is described using a raster image editor to determine the deviations of the axial points of the rail from the reference line. Various options are being considered for determining the size of one pixel depending on the shooting distance and the height of the camera above the rail. The results of measurements and their comparison with the results obtained by traditional methods, which showed a difference of 0-5 mm, are presented. An algorithm for determining the number of pixels contained in a line corresponding to a given distance to any shooting point is described, which allows for the determination of deviations in the image anywhere in the crane path.
Существует несколько методов определения непрямолинейности подкрановых рельсов мостовых кранов, подробно описанных в работе [1]. Все они, являясь контактными, связаны с многократным задействованием мостового крана, необходимостью выхода исполнителей на подкрановый путь и обозначения на рельсах точек съёмки. При этом требуется наличие специальных приспособлений, выполнение большого количества угловых, линейных или иных измерений, что в условиях действующих цехов сопряжено со значительными трудностями.
Высказанная в работе [2] идея использования фотограмметрических створов ввиду сложности классической обработки снимков не получила своего дальнейшего развития. В настоящее время в ряде статей [3, 4, 5, 6, 7] обращено внимание на достоинства цифровой фотограмметрии, позволяющие рекомендовать её для измерения геометрии объектов бесконтактным методом.
В статье предлагается бесконтактный метод определения прямолинейности подкрановых рельсов, основанный на обработке цифровых фотоизображений с использованием референтных линий.
Фотоизображение получается с помощью цифровой фотокамеры, установленной над рельсом в начале контролируемого участка. Рельс фотографируется в направлении его конечной точки (рис. 1а). Фотоизображение загружается в любой растровый редактор, после чего снимаются растровые координаты курсора левого и правого края рельса в начальной и конечной точках контролируемого участка (величины Л1, П1 и Лn, Пn). На снимке строится референтная линия 1-n так, чтобы растровые координаты в точках 1 и nбыли соответственно равны (Л1 + П1)/2 и (Лn+ Пn)/2. Далее снимаются растровые координаты курсора последовательно левого края рельса, в точках 2, 3, 4,… референтной линии и правого края рельса (величины Л, О и П в пикселях (пкс), соответствующие каждому положению курсора, см. рис. 1б).
По значениям этих координат вычисляются отклонения Δ оси рельса от референтной линии в пикселях, причём, знак «плюс» означает отклонение влево, знак «минус» – вправо.
Δ = О – (Л + П)/2 , (1)
Для перевода полученных результатов в метрическую систему единиц (мм) необходимо подсчитанные по формуле (1) значения Δ пкс умножить на соответствующий им размер пикселя δ мм/пкс, определяемый по формуле
 (2) (2)
где l – ширина головки рельса (П – Л) в мм и в пкс.
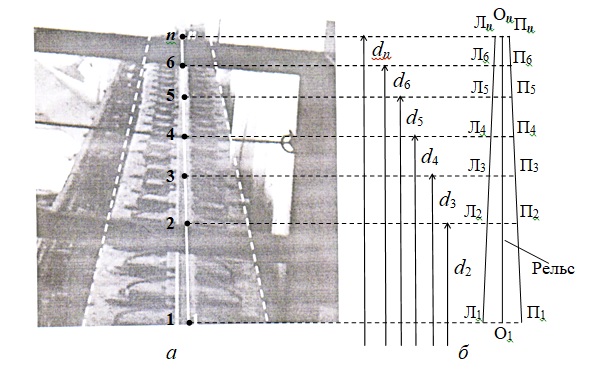
Рис. 1. Фотография рельса с референтной линией 1-n (а) и схемой измерения (б)
Ключевым моментом описанного подхода является установление зависимости размера одного пикселя в метрических величинах для разных расстояний d (рис. 1б). С этой целью было выполнено знаковое моделирование, сущность которого заключалось в фотографировании дорожного бордюра с известными размерами (рис. 2а) с высоты 1,0 и 1,5 м.
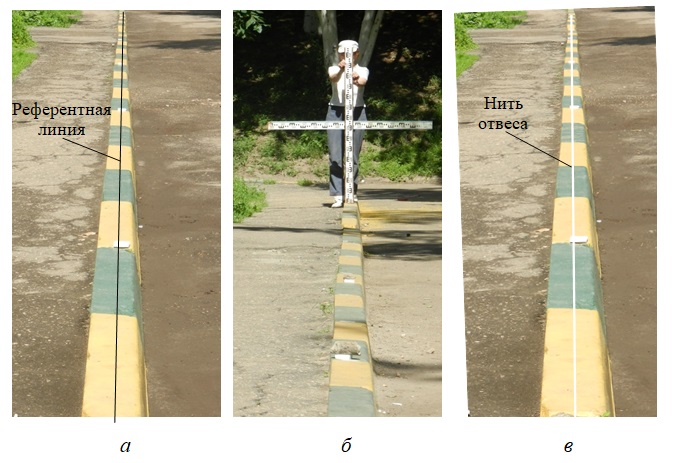
Рис. 2. Фотографии бордюра с референтной линией (а), с «крестом» (б) и отвесом (в)
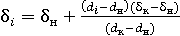
По полученным фотоизображениям в растровом редакторе были определены растровые координаты левого Л и правого П края бордюрного камня с интервалом 1 м. По разности этих координат и ширине бордюрного камня 120 мм были подсчитаны размеры в мм одного пикселя для каждого расстояния.
По полученным данным построены графики (рис. 3), наглядно иллюстрирующие, во-первых, прямолинейную зависимость между δ и d и, во-вторых, тот факт, что с уменьшением высоты фотографирования уменьшается размер одного пикселя.
Поскольку зависимость δ от dносит прямолинейных характер, то на практике рекомендуется ограничиться тщательным определением δн в начале и δк в конце контролируемого участка, а любой размер пикселя δi может быть найден по формуле:
 , (3) , (3)
где δi – размер пикселя на расстоянии di; δн– размер пикселя на расстоянии dн ; δк – размер пикселя на расстоянии dк .
По формуле (3) были подсчитаны теоретические значения δ. Их расхождение с экспериментальными данными оказались в пределах от –0,6 до +0,2 пкс для высоты фотокамеры 1,5 м и от –0,2 до +0,1 пкс для высоты 1,0 м. Для повышения точности определения размера пикселя на расстояниях dн и dк удобно использовать нивелирную рейку, устанавливаемую горизонтально или вертикально.
Рис. 3. Графики зависимости размера пикселя δ от расстояния dи высоты
расположения камеры 1,5 м, 1,0 м и 0,75 м
С целью определения соотношения размеров одного пикселя, найденных по горизонтальному и вертикальному базисам. была выполнена соответствующая калибровка цифровой фотокамеры Nikon COOLPIX S9100.
Методика калибровки заключалась в фотографировании «креста» из двух 1,5-метровых нивелирных реек в интервале от 2 до 30 м (рис. 2б). Для этого фотокамера центрировалась над осью бордюра в его начале на высоте 0,75 м. Оптическая ось камеры ориентировалась вдоль этой полосы и была направлена на центр «креста», установленного в конце контролируемого участка. Последовательно при неподвижном положении фотокамеры фотографировали «крест», однообразно устанавливаемый по оси бордюра.
На каждой фотографии в растровом редакторе снимались растровые координаты в пикселах левого Л, правого П, верхнего Ви нижнего Нконцов обоих базисовили их видимой на снимке части. Результаты обработки снимков иллюстрируются совмещённым графиком на рис. 3, подтверждая, во-первых, ранее сделанный вывод о зависимости размера одного пикселя от высоты расположения фотокамеры. Во-вторых, для фотокамеры Nikon COOLPIX S9100 определение размера одного пикселя может осуществляться как по горизонтальному, так и по вертикальному базису.
Кроме того, по формуле (3) были подсчитаны теоретические значения δ. Их расхождение с экспериментальными данными оказались ничтожными в пределах от –0,01 до +0,02 пкс.
Отличительной особенностью предлагаемого бесконтактного метода является то, что в качестве референтной линии может быть использована нить шнурового отвеса. Для этого достаточно сфотографировать отвес на фоне исследуемого участка. Если на фотографии (рис. 2в) нить отвеса будет совпадать с начальной и конечной точками линии 1-n, то в результате обработки снимка можно получить сразу отклонения осевых точек рельса от этой линии. В этом отношении представляется перспективным применение программы Plumb-bob, позволяющей всегда иметь на снимке изображение вертикальной прямой, которую можно использовать в качестве референтной линии.
Для определения непрямолинейности бордюра была проведена на фотографии, выполненной с высоты фотокамеры 1,0 м, референтная линия (рис. 2а) через начальную и конечную точки, которым соответствовали растровые координаты (Лн + Пн)/2 и (Лк+ Пк) /2 и через 2 м были определены координаты Л, О и П и вычислены значения (Л + П)/2.
Для того, чтобы обнаружить возможные грубые ошибки в замеренных координатах Л, П, О и полусумме (Л + П)/2, построены графики, представленные на рис. 4.
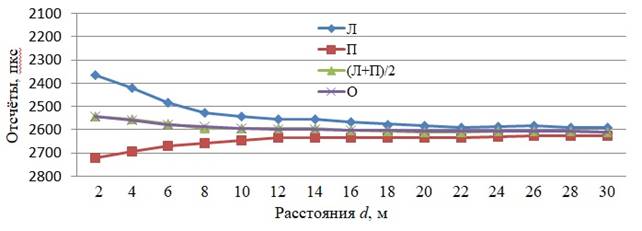
Рис. 4. Графики зависимости отсчётов Л, О, П, (Л+П)/2 по курсору от расстояния d
По формуле (1) с учётом формулы (2) были подсчитаны отклонения Δ в мм. Для контроля было выполнено обычное боковое нивелирование бордюра и подсчитаны отклонения Δʹ. По их значениям построены графики отклонений осевых точек бордюра от референтной линии (рис. 5), наглядно показывающие хорошую сходимость результатов обработки фотоснимков и бокового нивелирования.
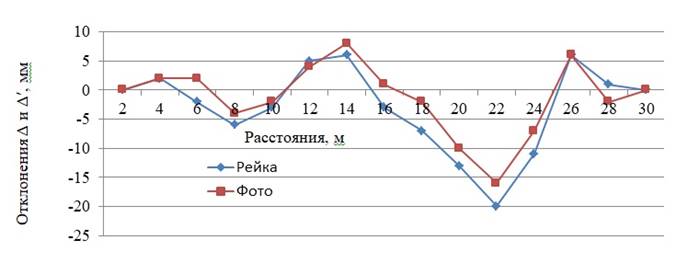
Рис. 5. Графики отклонений осевых точек бордюра от референтной линии
Решение задачи по определению на снимке расстояний между точками 1, 2, 3,… (рис. 1) осуществлялось следующим образом. На снимках (рис. 2а), выполненных с высоты 1,0 и 1,5 м, было определено количество р пикселей, содержащихся в известных расстояниях 3, 4, 5,…, 28, 29, 30 м от фотокамеры до точек съёмки. Результаты измерений представлены в таблице 1 (графы 2, 4, 7, 9).
Таблица 1
Соотношение между расстоянием и количеством пикселей
при различной высоте расположения камеры
|
Рас-сто-яния d, м
|
Количество пикселей, пкс
|
Рас-сто-яния d, м
|
Количество пикселей, пкс
|
|
Высота 1,0 м
|
Высота 1,5 м
|
Высота 1,0 м
|
Высота 1,5 м
|
|
p
|
А
|
p
|
А
|
p
|
А
|
p
|
А
|
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
|
3
|
2981
|
8943
|
1081
|
3243
|
17
|
311
|
5287
|
131
|
2346
|
|
4
|
2160
|
8640
|
809
|
3236
|
18
|
277
|
4986
|
121
|
2178
|
|
5
|
1696
|
8480
|
644
|
3220
|
19
|
251
|
4769
|
112
|
2128
|
|
6
|
1362
|
8172
|
523
|
3138
|
20
|
220
|
4400
|
98
|
1960
|
|
7
|
1137
|
7959
|
442
|
3094
|
21
|
193
|
4053
|
90
|
1890
|
|
8
|
966
|
7728
|
377
|
3016
|
22
|
172
|
3784
|
83
|
1826
|
|
9
|
826
|
7434
|
327
|
2943
|
23
|
158
|
3634
|
77
|
1771
|
|
10
|
714
|
7140
|
281
|
2810
|
24
|
141
|
3384
|
72
|
1728
|
|
11
|
630
|
6930
|
253
|
2783
|
25
|
125
|
3125
|
64
|
1600
|
|
12
|
551
|
6612
|
225
|
2700
|
26
|
110
|
2860
|
58
|
1508
|
|
13
|
490
|
6370
|
202
|
2626
|
27
|
94
|
2538
|
53
|
1431
|
|
14
|
438
|
6132
|
180
|
2520
|
28
|
76
|
2128
|
47
|
1316
|
|
15
|
390
|
5850
|
167
|
2505
|
29
|
64
|
1856
|
43
|
1247
|
|
16
|
350
|
5600
|
155
|
2416
|
30
|
53
|
1590
|
39
|
1170
|
| |
|
|
|
|
|
|
|
|
|
|
На основании данных табл. 1 построены графики зависимости расстояний d от количества содержащихся в них пикселей р привысоте расположения камеры 1,0 и 1,5 м (рис. 6).
По таким графикам, вычерченным в крупном масштабе, можно определять графически или аналитически расстояния dʹ в зависимости от количества пикселей pʹ для применяемой методики фотографирования. Методика таких определений подробно описана в работе [8].
Особый интерес представляют произведения А = dp(см. графы 3, 5 и 8, 10 табл. 1). По их значениям построены графики, иллюстрирующие прямолинейную зависимость коэффициента А от расстояния d(рис. 7).
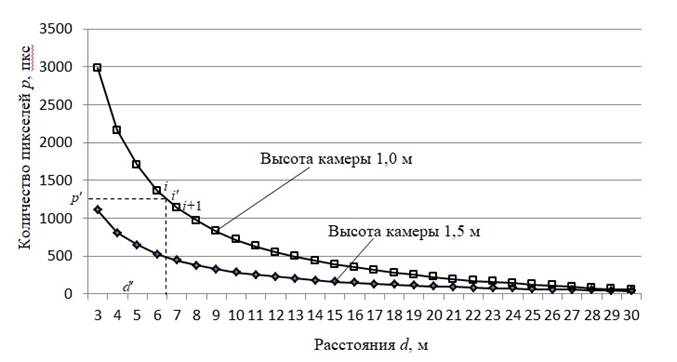
Рис. 6. Графики зависимости расстояния d от количества пикселей р
и высоты расположения камеры
Поскольку зависимость А от dносит прямолинейных характер, то на практике можно ограничиться тщательным определением Ан в начале и Ак в конце контролируемого участка, а любой размер Аi может быть найден по формуле [9]:
 , (4) , (4)
где Аi , Ан и Ак – размер коэффициента А соответственно на расстоянии di, dн и dк.
При использовании описанного метода определения прямолинейности подкранового рельса основная задача заключается в определении на снимке местоположения точек съёмки 1, 2, 3,… (рис. 1), которые, например, могут располагаться против каждой опорной колонны при их шаге 6 м. Для этого, рельс фотографируется фотокамерой, установленной над ним, как это показано на рисунке 2а без базиса,или с базисом (рис. 2б) или с отвесом (рис. 2в).
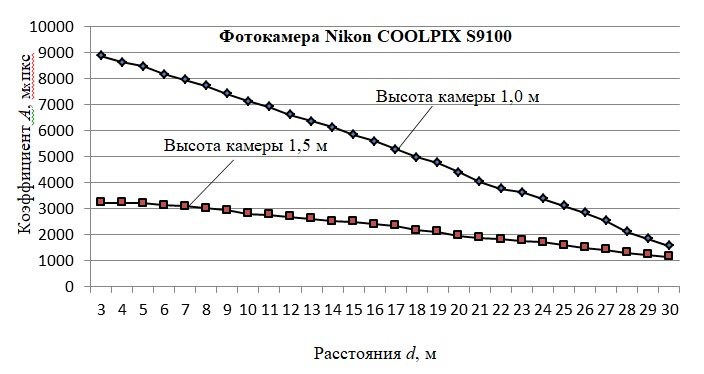
Рис.7. Графики зависимости коэффициента А от расстояния d
и высоты расположения фотокамеры
На снимке в растровом редакторе замеряются растровые координаты в пикселах рн и рк, , соответствующих расстояниям dн и dк. Далее вычисляются коэффициенты Ан = dнрн и Ак = dкрк. По формуле (4) определяются величины коэффициентов Аi длярасстояний di и вычисляется количество пикселей рi = Аi/di, соответствующих положению съёмочных точек iпротив каждой колонны или в любом другом месте. Откладываются на снимке вычисленные значения рiи в полученных точках i производят необходимые измерения Л, П и др.
Для определения точности предлагаемого метода были вычислены по формуле (4) теоретические значения Ат и теоретические значения количества пикселей рт, соответствующие каждому расстоянию d.
На рис. 8 представлены графики, иллюстрирующие зависимость фактических и теоретических значений Аф, Ат и рф, рт от расстояний d. По разностям фактических и теоретических значений А и р получены ошибки определения расстояния, которые для высоты фотографирования 1,0 м и 1,5 м не превысили по модулю соответственно 19 мм и 36 мм. Для определения непрямолинейности подкрановых рельсов данная точность является достаточной.
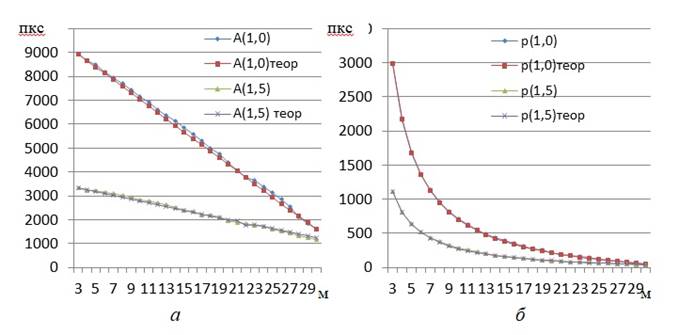
Рис. 8. Графики зависимости Аф, Ат (а) и рф, рт (б) от расстояния d
Следует отметить, что описанный бесконтактный метод определения непрямолинейности подкрановых рельсов, основанный на обработке цифровых фотоизображений в стандартных растровых редакторах, отличается простотой выполнения, объективностью и информативностью. Основная задача при этом заключается в разработке методики фотографирования с целью, во-первых, получения снимков наиболее высокого разрешения и, во-вторых, выполнения фотографирования так, чтобы на снимке имело место равенство (Лн + Пн)/2 = (Лк+ Пк)/2. В этом случае отпадает необходимость иметь на снимке референтную линию и определять ее растровые координаты О, поскольку все они будут постоянны. В противном случае растровые координаты О могут быть подсчитаны с учётом приведенных выше формул и без наличия на снимке референтной линии.
References
1. Shekhovtsov G.A. Sovremennye metody geodezicheskogo kontrolya khodovoi chasti i putei mostovykh kranov: monografiya / G.A. Shekhovtsov // Nizhegor. gos. arkhitektur.-stroit. un-t. – 2-e izd., pererab. i dop. – Nizhnii Novgorod: NNGASU, 2018. – 185 s.
2. Lyashchenko Yu.K. Issledovanie tochnosti posledovatel'nykh fotogrammetricheskikh stvorov / Yu.K. Lyashchenko // Inzh. geod. – 1984, – №27. – S. 65–68.
3. Ustavich G.A. O primenenii nemetricheskikh tsifrovykh kamer dlya inzhenerno-geodezicheskikh izmerenii / G.A. Ustavich, Ya.G. Poshivailo // Geod. i kartogr. – 2005. – № 8. – S. 19–24.
4. Katsarskii I.S. O tsifrovoi fotogrammetrii i perspektivakh ee primeneniya / I.S. Katsarskii // Geoprofi. – 2006. – № 6. – S. 4–8.
5. Barsukov K.G. Issledovanie vozmozhnostei nemetricheskikh tsifrovykh fotoapparatov pri reshenii inzhenerno-stroitel'nykh zadach / K.G. Barsukov // Nauch. vestn. Voronezhsk. gos. arkhit.-stroit. un-ta. – 2007. – № 3. – S. 82–85.
6. Bernasik Jerzy, Mikrut Sławomir Automatyzacja fotogrametrycznych pomiarów odkształceń dachowych dźwigarów hal przemysłowych // Geodezja. – 2006. – 12, № 2. – S. 113, 141–149.
7. Dzharroush D. Bytovaya tsifrovaya kamera kak instrument dlya tochnykh geodezicheskikh izmerenii / D. Dzharroush // Geoprofi. – 2014. – № 4. – S. 46–49.
8. Shekhovtsov G.A. Kontrol' prostranstvennogo polozheniya i formy stroitel'nykh konstruktsii s pomoshch'yu nemetricheskikh tsifrovykh kamer [Tekst]: monografiya / G.A. Shekhovtsov, O.V. Raskatkina / Nizhegor. gos. arkhitektur.-stroit. un-t. – Nizhnii Novgorod: NNGASU, 2017. – 118 s.
9. Shekhovtsov G.A. Teoreticheskie osnovy beskontaktnogo fotograficheskogo sposoba izmereniya rasstoyanii pri opredelenii deformatsii inzhenernykh sooruzhenii / G.A. Shekhovtsov, O.V. Raskatkina // Privolzhskii nauchnyi zhurnal / Nizhegor. gos. arkhitektur.-stroit. un-t. – Nizhnii Novgorod. 2019. – №2. – S. 44–51.
|

 Eng
Eng








